IARC 2019 Countdown:
- English

INTRODUCTION
The primary purpose of the International Ae-rial Robotics Competition (IARC) has beento “move the state-of-the-art in aerial roboticsforward” through the creation of significant anduseful mission challenges that are ‘impossible’at the time they are proposed, with the idea that when the aerial robotic behaviors called for in the mission are eventually demonstrated, the technology will have been advanced for the benefit of the world.
Mission 8 will build on past missions to demonstrate both enhanced Mission 7 behaviors as well as new aerial robotic behaviors unique to Mission 8.
TECHNOLOGIES TO BE DEMONSTRATED
Beyond those technologies and behaviors that have been demonstrated during past missions (full autonomy, obstacle avoidance, tracking,etc.) the following are emphasized:
1. Man-machine interaction (non-electronic command and control)
2. Fused sensory enhancement of a human operator by a fleet of aerial robots
3. Swarm interaction
4. Aerial target designation
5. Head-to-head interaction with opposing aerial robots
As unmanned systems continue to be characterizedby advanced autonomous capabilities, the human advantage grows as timely, relevant, and correct information is shared between distributed agents. Alongside advances in autonomous behavior, the collection of previously unattainable amounts of salient data is possible as sensors distributed across multiple disparate assets work cooperatively towards efficient mission completion. In this environment, humans will still rely on relevant and timely information to make critical decisions, but access to much larger volumes of shared information will ultimately prove overwhelming. Command and control in this way must be considered in the context of the finite processing capabilities of humans. Unique challenges in this space include the development of appropriate dynamic tasking across teams of human and unmanned assets.
During Mission 8, these technologies will be demonstrated as a single person working with a team of aerial robots, attempts to retrieve a critical component that necessary to prevent a reactor from failing. Opposing aerial robotic sentries will attempt to prevent that person from interfering with reactor operation.
VENUES AND INTERNATIONAL TEAMS
The International Aerial Robotics Competition Mission 8 will be conducted at two venues: The American Venue and the Asia/Pacific Venue. The locations of these venues will be announced at the Official IARC website. Instructions about how to enter this competition are given later in these rules. Teams must designate at which of the two venues they wish to compete. Once a venue is selected, teams will continue to compete at the selected venue unless they choose to re-register and start over by paying the up-front one time Application Fee.
Each venue has visa and customs requirements that are dictated by the host country and are beyond the control of the IARC Organizer and Staff. It is recommended that international teams requiring visas, begin the visa acquisition process several months in advance of the IARC.
Check customs procedures and in some cases it may make more sense to ship equipment ahead by international courier than attempting to carry it as carry-on or checked baggage.

NARRATIVE
The starship I-Ark is en route to colonize a Class-1 planet in the Proxima Centauri system,approximately 0.89 parsecs from Earth. A reactor failure has occurred and the substitution of a critical component is necessary. There are 5,000 colonists in suspended animation on board. As the ship’s engineer, you have been awakened and released from your hibernation pod by the central computer to fix the problem,but you only have 8 minutes to retrieve the required critical replacement component and install it before the reactor shuts down permanently and all life support systems fail.
The reactor is protected by aerial robotic sentries that do not recognize you and will attack you. You have activated four aerial robots to assist you when entering the reactor control room.They will help you locate the necessary replacement component and can counter the attacks of the sentry robots which can kill you.
You must locate the necessary component, physically retrieve it without being killed, and replace the failed component in under 8 minutes. Your aerial robotic helpers will only accept non-electronic commands of your choosing (gestures,voice commands, etc.). Sentry robots can inflict wounds which can kill you but your aerial robotic helpers have the ability to shield you and even heal some wounds if they are in proximity to you and are commanded to do so.
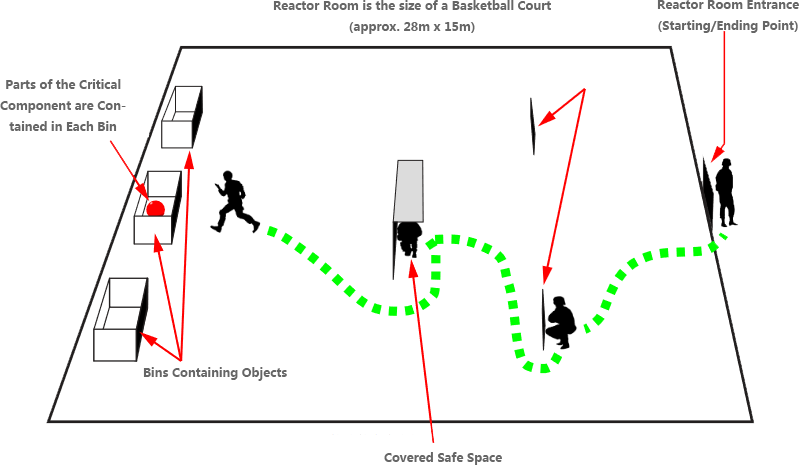
Figure 1. Search and Ingress.
THE REACTOR CONTROL ROOM
The reactor control room is the size of a basketball
court (28m x 15m). The floor surface is of
an unknown pattern. Within the reactor control
room are various obstacles as shown in Figure
1. These obstacles can be used for partial cover
from the view of the sentry robots. Four (4)
parts bins are located somewhere at the opposite
side from the Reactor Room entrance. Disassembled
parts of the critical component are
locked in each of the parts bins.
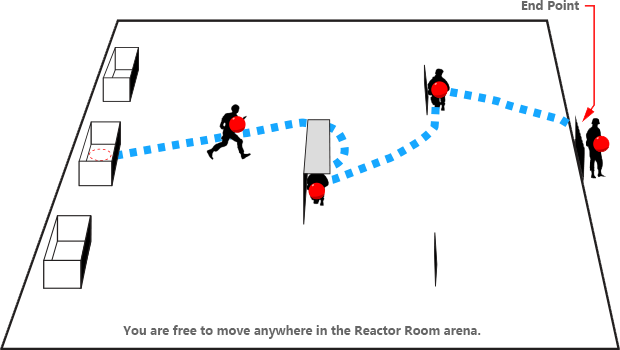
Figure 2. Component acquisition and egress (component shown is notional) .
SENTRY ROBOT BEHAVIOR
(Sentry Robots are part of the Arena)
Sentry robots will scan the reactor control room for intruders and will attempt to kill them with laser beams. Originally designed to kill rodents onboard the starship during the 8 year journey,the sentry robot laser beams are weak, but a human that is hit by these lasers 10 times will die.Sentry robots will attack any foreign objects that they detect and will approach and follow those objects until they can neutralize them with their laser beams. Lasers require 5 seconds to recharge between firings, so the maximum attack rate is once per 5 seconds by any given sentry robot. Only one sentry robot will attack a given target at a time. The effective range of these lasers is unknown to you.

Contact name:Mr.Daiqiyong
Contact phone:18610807735
Email address:iarcap@163.com
Address:Southwest Gate of Beihang University Stadium
©2019 Organizing Committee of IARC (Asia-Pacific Division)
